Motivation
Trotz des großen Potenzials und steigenden Absatzes von kollaborationsfähigen Robotern (Cobots) werden diese derzeit nur in einer sehr begrenzten Anzahl industrieller Anwendungen eingesetzt. Gründe dafür sind die hohen Sicherheitsanforderungen, die vergleichsweise langsamen Bewegungen der Roboter im schutzzaunlosen und kollaborativen Betrieb und dementsprechende Grenzen eines wirtschaftlichen Einsatzes. Zudem fehlen intuitiv nutzbare Hilfsmittel zur Roboterprogrammierung sowie dokumentierte und nutzbringende Best Practice-Anwendungen, die einfach übertragen und im industriellen Umfeld eingesetzt werden können.
Inhalte und Zielsetzung
Vor diesem Hintergrund richtet das vorliegende Projektvorhaben den Blick auf österreichische Makerspaces. Diese sind gemeinschaftliche Werkstätten, in denen Menschen auch ohne eine einschlägige Ausbildung (die sog. „MakerInnen“) der Zugang zu industriellen Maschinen kostenlos oder gegen eine Gebühr gewährleistet wird. Makerspaces bieten Basisschulungen für interessierte Personen an, die anschließend bei der Arbeit sich selbst überlassen werden. Mit dem Entstehen des Formats der Makerspaces existiert ein geschützter Raum für kreative technische Aufgaben- und Lösungsfindung für ein breites interessiertes Publikum von Nichtexperten. Durch die Einführung der Cobot-Technologie in die GRAND GARAGE® in Linz adressiert das Projekt eine Reihe von Problemstellungen im Bereich der intuitiven Roboterprogrammierung, der Robotersicherheit und der Erkenntnisgewinnung aus der Anwendung von Cobots durch interessierte Laien.
Forschungsschwerpunkte
Die Einführung von Cobots in Makerspaces und FabLabs stellt eine Reihe von Herausforderungen, aus denen sich folgende Forschungsschwerpunkte ableiten lassen:
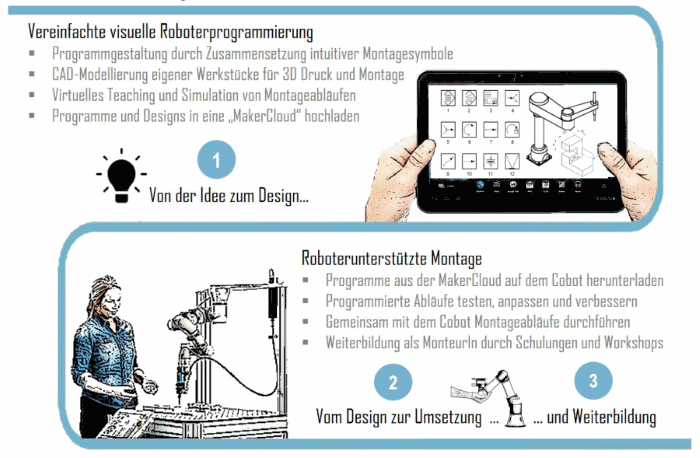
- Realisierung einer vereinfachten visuellen Programmierumgebung für die virtuelle Gestaltung von Mensch-Roboter-Montageabläufe. Hierzu bieten sich als Grundlage bestehende Softwarewerkzeuge, wie etwa Blockly oder Franka Emika Desk.
- Erforschung von Anwendungsfällen und Montageassistenzmitteln für die Mensch-Roboter Kollaboration in der Einzelplatzmontage, in denen keine Vorkenntnisse über kollaborative Roboter erforderlich sind. Dabei soll eine Prozess- und Use Case-bibliothek für Anwendungen und Tutorien entwickelt werden.
- Erfassung und Auswertung relevanter Montageteilprozesse und Kollaborationsmuster zur Erforschung neuer Lehr- und Lernmethoden im Bereich der Montagetätigkeiten sowie neuer Mensch-Roboter Kollaborationsformen.